Fig. 1. The system construction.
For the research of off shore "stages" where many earthquakes have
occurred around Japan, we
have developed pop-up ocean bottom seismometers (OBS) with high mobility
for temporal dense
observations and ocean bottom cable systems for stationary geophysical
observations. But, it is
necessary to have an observation system with mobility and realtime
data acquisition for precise
research of transitions of aftershock or earthquake swarm activities.
In these points, two observation
systems mentioned above are not adequate. For this reason, the Earthquake
Observation Center has
started a development of the semi realtime ocean bottom seismic and
geodetic observation system by
using technology of an underwater acoustic communication and a satellite
telemetry from 1996. After
the field test which was performed in 1998, this system was deployed
for the swarm observation off
Niijima-Kozu islands in the summer of 2000.
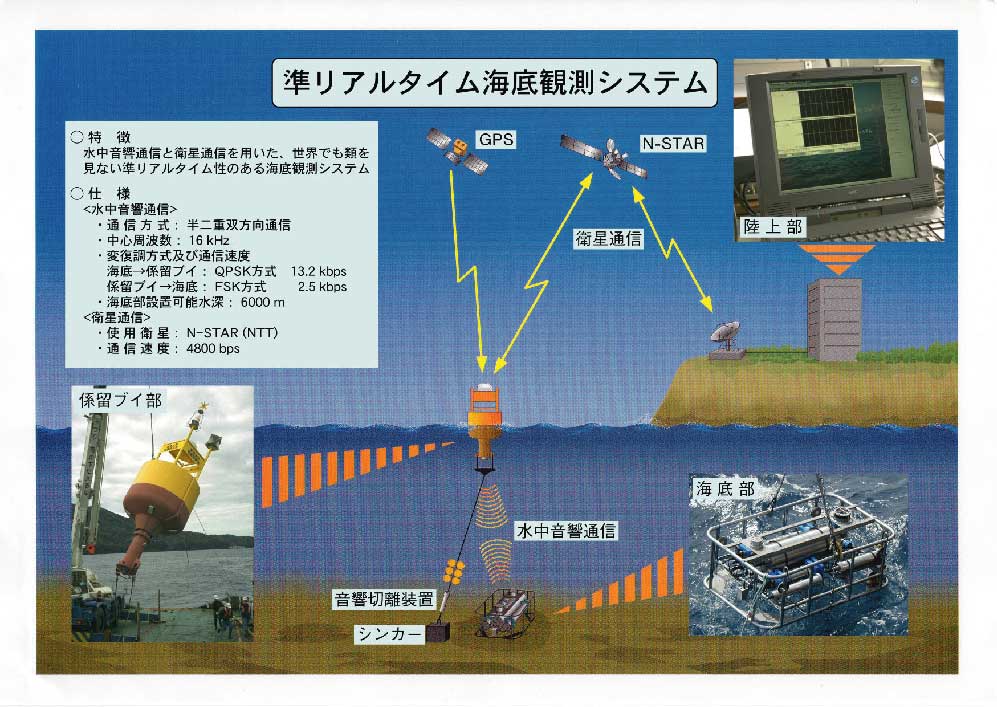
Fig. 1. The system construction.
The construction of this system (Fig. 1) contains, 1) the ocean bottom
unit (OBU) that acquires and
records seismic signals, 2) the moored buoy unit (MBU) that performs
underwater acoustic
communication with the OBU and the satellite telemetry, and 3) the
land control unit (LCU) that
receives the acquired data and controls the OBU and the MBU. Measured
values from the broadband
precision 3-component accelerometer and the pressure gauge of the OBU
are continuously stored in
hard disks (16GB) with a high resolution digitizing (100Hz, 24bit).
The time accuracy of the OBU is kept
as better than 10ms by the combination of the DTCXO and the time difference
measurement between
the GPS on the MBU and the OBU Clock. As it is impossible to use electric
waves in the deep sea, the
high-speed underwater acoustic communication system (~13200bps) is
used between the OBU and the
MBU. The NTT satellite phone system (N-STAR) and the GPS for location
and time are equipped on
the MBU, which also has a two axes gimbal mechanism for the tracking
antenna of the satellite phone
due to large sway of the buoy. Both the OBU and the MBU have large
capacity lithium cells for the
power source. The speed of satellite data communication is 4800bps
(maximum). The LCU can control
almost all parameters of the OBU and the MBU. The received data is
analyzed with the land seismic
network data immediately. It is still impossible to perform a true
realtime (continuous) ocean bottom
observation, because of the limited speed of the communication and
the capacity of the power source.
So that only the data of preset time windows is received in usual operations.
The field test was performed at the northeast part of the Suruga Bay
in December of 1998. In this
test, a satellite phone on the ship was used instead of the LCU, and
the ability of the underwater
acoustic communication system was examined by measuring of the noise
level and variation of the
output acoustic power. As the result, this system is operative up to
the depth of 4000m with enough
signal to noise ratio.
Short term and repeated observations by using many pop-up OBSs were
performed during the swarm
off Niijima-Kozu islands after the eruption of the Miyake island since
June of 2000. This system was
deployed in the center of this area to detect changes of the swarm
activity in August (Fig. 2). True,
shallow distribution of epicenters were revealed in semi realtime,
those were uncertain only by the
data of observatories on near islands (Fig. 3). Usefulness of this
system is clearly indicated by this
observation.

Fig.2. The MBU of this system deployed off Niijima island.
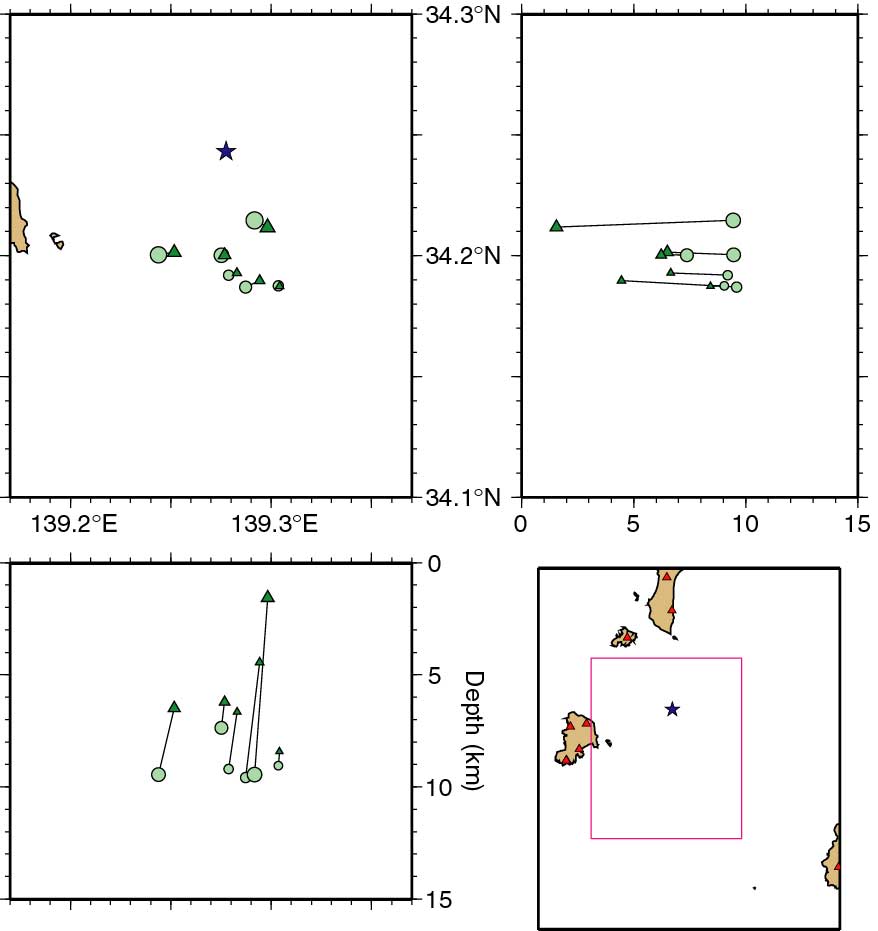
Fig.3. Improved epicenter distribution and map of observatories (lower
right). Locations
are indicated as triangles (land) and a star (this system).
Epicenters are changed from
circles (almost initial depths) to triangles.