|
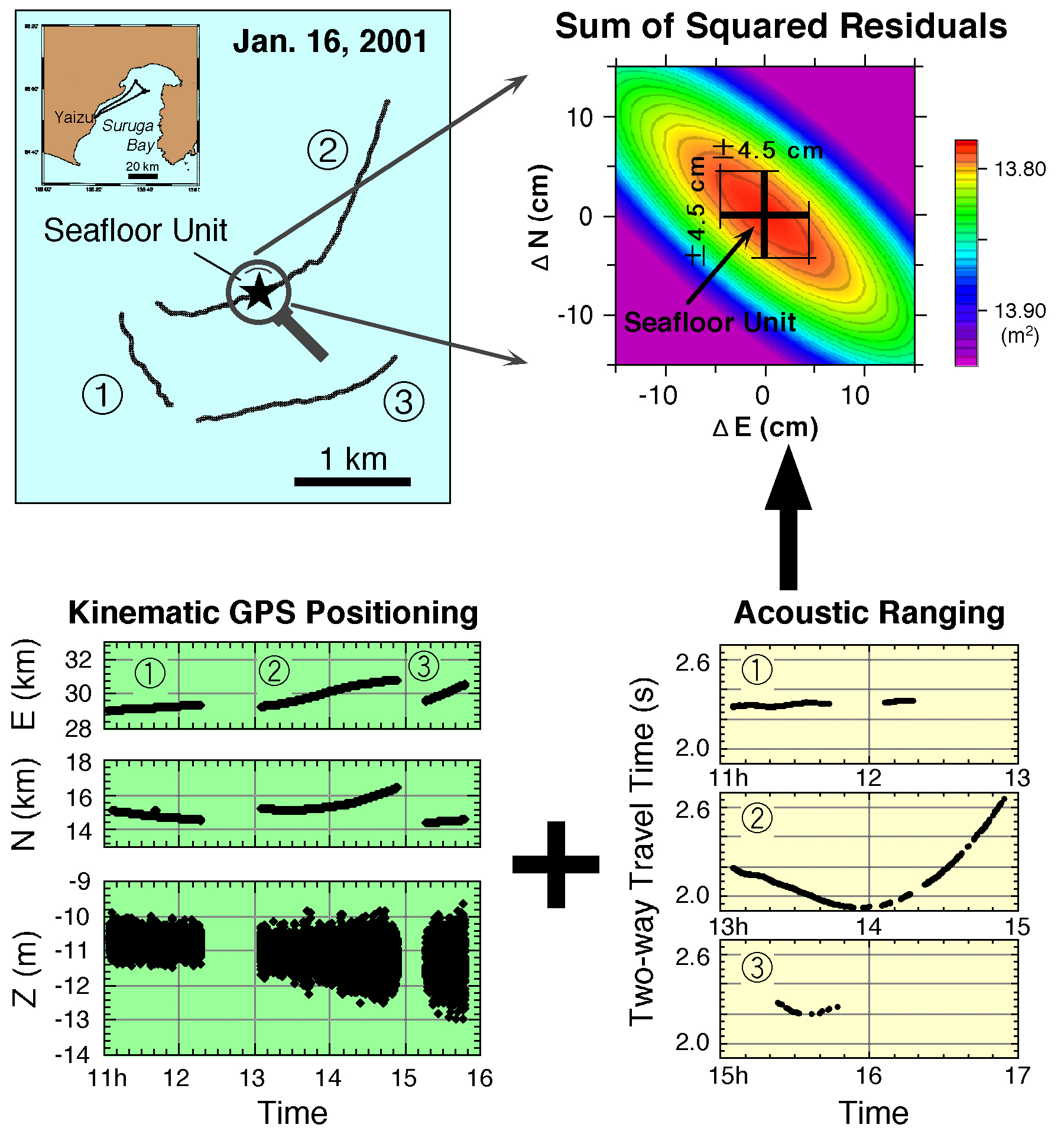
第8章 「観測技術開発」研究計画 1.はじめに 地震予知の研究とは,地震発生場の広域定常的なバックグラウンド活動から地震発生へのゆっくりとした準備過程,非可逆な直前過程,動的な破壊過程・強震動発生へとつながるプロセスを研究し,発生予測の手法の確立を目指すものである.その研究は,理論的・実験的研究のみならず,地下構造と状態の調査・モニタリング技術に立脚していて,それらの技術なしには地震予知研究は考えられない.地震観測装置やGPS観測装置はその典型的な観測技術であって,それらの技術開発と普及によって,爆発的に地震の研究が進んだのは周知の通りである.このような地震予知を支える将来性のある技術開発を奨励するのが,「観測技術開発」計画推進部会の役割である. ここではまず,地震予知観測を支える観測の技術開発の歴史について概観する.地震予知計画の開始とともに,地震予知を目指した観測が本格的に開始された.地震計測,地殻変動計測などが開始された.これら実践的な観測と同時に,観測技術の開発が継続して行われてきた. ・地震観測 地震予知計画においては,固有周期1Hzの地震計が標準的に導入されたが,センサーの開発よりはテレメータ技術の開発に主力がそそがれた.電話回線や無線を利用してテレメータデータ電送が行われ,現地の地震波形データを大学等の拠点まで高品質で送る手法の探求が,実践的な地震観測と平行して行われた.初期はFM変調による転送が主流でSN比はせいぜい40dB(7ビット相当)であったが,80年代のデジタル技術の進歩によりデータ電送そのものをデジタルで行うようになり12ビットから16ビットの電送が行われるようになった.しかしながらこれらのデータ電送は,大振幅の振動で簡単にレベルが飽和したり,このころに開発されてきた広帯域地震計のデータ電送には不十分だった.デジタルサンプリングが行われていたものもあったが,主に時計の問題でタイミングの正確さやふらつき問題があった.またデータ伝送のプロトコルもそれぞれの大学(または請け負ったメーカー)独自の物が用いられていた. それらを抜本的に解決したのは,1990年代に本格的に普及したGPS時計とネットワークの標準として普及したIPの技術である.GPSによりデータサンプリングの刻時精度の飛躍的向上と管理性の向上がもたらされた.最近ではΔΣ型のAD変換タイミングそのものがGPS時計に同期されるまでになっている.IPはインターネットの普及により,コンピュータ同士だけでなく,通常の計測インタフェースの標準的プロトコルとしての地位を確立してきた.IPで用いられるプロトコルのうちTCP/IPはアプリケーションからのエラー訂正を不要にしているが,多少の欠測を許してもリアルタイム性を重視する地震観測ネットワークには向かない点がある.地震観測には,同じIPでも,より単純な通信としてUDP/IPが用いられることが多い.いずれにせよ一旦IPを用いた通信を開発しておけば,有線・無線などの回線を気にしないで応用が可能になる. ・GPS 地殻の歪みとその変動を計測することは,地震予知のために欠かせない技術である.しかしながら地殻歪み計測はGPSが本格的に導入されるまでは,ほとんど結果らしい結果が見られなかった.GPSは,知られている通り米国が国防のために開発した技術であるが,その民生分野への応用と波及範囲は多岐にわたる.地震予知に関連した研究には80年代の半ばから導入されてきた.いくつかの試験的な観測によりGPSの有効性がはっきりし,90年代に入って,国土地理院のGeonetに代表されるように地殻変動の検出に本格的に用いられる用になってきた.従来は測距などによって長時間かけて苦労して測量していた日本列島の変形がいまや瞬時に判るようになり,それに伴って今まで知られていなかったプレート固着や日本列島の変形についても興味ある現象が次々に発見されるようになってきた. ・歪み連続観測 地殻の歪みを計測する研究は,地震の発生が地殻の変形と密接に関係するという予測から,当然のこととして開始された.地震予知計画初期には,温度変動を押さえるために岩盤に掘られた横坑中に,数10mにわたる石英管を設置して地面の伸縮を計測したものが多い.10-9もの公称精度を誇っていたが,一般的には雨や地下水などによる変動や,その他原因不明な変動が大きいこと,またドリフトを含めた長周期のノイズレベルが大きいこと,地震の震動による予測できないステップが表れるなど,信号とノイズとの区別をつけにくく,実用化されたとは言い難い.現在は雨などの影響をさけるために,もっぱら深部ボアホールでの計測に主流が移っている. 2.地震予知研究における開発の段階について 観測技術開発とは,原理的に可能であっても実際の研究に役立つ段階には至っていないものを,地震予知研究に役立つ段階にまで持っていくものである.観測技術開発計画推進部会では,従来計測できなかった量の計測,従来計測できなかった環境での計測,従来計測できなかった精度での計測に向けた技術開発を奨励・推進している. 以下の議論で,それぞれの観測機器開発の段階を明確にするために,新しい観測技術が実用化されていく段階を次のように区分しておく. (1)機器開発の段階 ある物理量をある環境のもとで測定するための機器そのものを開発する段階である.装置開発のための設計から,実際の製作までをいう. (2)開発のための試験観測 実際にできあがったシステムも,現場で使うと様々な問題が発生する.それらの問題を洗い出して,開発にフィードバックすることになる.この段階は,地球科学として役立つ結果を出すよりは観測機器の性能向上を目的とする観測をに比重が置かれる.観測期間は比較的短期である. (3)研究的要素を取り入れた試験観測 前段階よりは一歩進んで,実際の地球科学に役立つ結果を出すことも視野に入れた観測である.地球科学の場合,この段階で長期観測となることが多い.地球科学的に興味のあるデータの取得も視野に入れられるが,同時に観測機器の性能向上のためのデータも取得する.この段階でも開発研究者が観測に深く関わっている. (4)実用的観測 開発者の手を放れて,観測機器の運用ができる段階.また観測技術が民間移転され,装置の維持管理が会社組織などの外部委託でできる段階である.取得されたデータに興味を持つ研究者の積極的参入がなされるのは,多くはこの段階に至ってからである.現在の地震観測およびGPS観測網はすでにこの段階である. 観測技術開発計画部会は上記の(1)(2)に対応する技術について積極的に支援していく役目を負っている.(3)の段階の技術は他の計画推進部会との協力の下に推進すべきである. 3.個別項目の主な成果 「観測技術開発」に関しては,全体としての成果を示すことは技術開発の性格上適当ではないので,個々の研究グループの成果について示すとともに,それぞれの進展段階への評価を次の章で示すことにする.平成12年に提案された個々の課題の成果の詳細は「地震予知のための新たな観測計画」平成12年度年次報告の大学別版を参照いただきたい. 3.1 海底諸観測技術 東京大学地震研究所において開発が行われている.平成12年度までの成果としては,海底における歪み・傾斜観測が可能になったことである(Kanazawa, et al., 2001; Fujimoto and Kanazawa, 2001).海底体積歪み計に関しては,鋸山の試験観測井における試験観測が続けられている.(東京大学地震研究所[課題番号:0113a]) 3.2 GPS音響結合式測地測量 この研究は,名古屋大学,東北大学,東大地震研によって行われている.この分野では米国が先行している.また日本においても海上保安庁水路部において10年来開発が進められていて,すでに繰り返し測量が行われようとしている.大学においては,海面と海底との間の測距に関して,いくつか通信手法が用いられているが,いずれもほぼ実用的レベルに達している.現状での最大の問題点は,実は船の位置を正確に測定することであり,キネマティックGPSによる長基線の測位の精度向上が目下の最大も課題である.現状では,GPS測位がうまくいった場合の海底位置測定精度(一回の実験での繰り返し精度)は5cm程度と見積もられ(図1),海上保安庁の得ている精度と遜色はない.名大のグループはこの技術に関してはNASAと協力をして技術導入をはかり,東北大学グループはスクリプス海洋研究所との共同開発をする予定である.いずれもほどなく繰り返し測定の実験にはいることができるものと考えられる.平成12年度においては三陸沖やハワイ沖で東北大学のグループが(東北大学「課題番号:0503」;東京大学地震研究所[課題番号:0113a]),また駿河湾や三河湾・伊勢湾においては名古屋大学のグループが(名古屋大学[課題番号:0906])「実践」にむけた観測を始めている.(藤本・他,2001;Osada et al., 2000;田所・他,2001) 上記以外の問題点は,海水温による音波変動をどのように補正して,海底での測位を正確に行うかである.この点に関しては,実際の繰り返し測定を行いながらトモグラフィー等のテクニックを用いて改善されていくことが期待される. 3.3 深部ボアホールによる歪み・応力測定 名古屋大学と東京大学地震研究所により行われた.インテリジェント型歪み計の改良を進めるとともに,深さ300m~500mにおける測定技術の開発が行われた(石井・他,2000; 松本・他,2000;山内・他,2000).最終的には2000m級の井戸での計測を目指している.なお東京大学地震研究所の担当教官の退官により大学での開発は名古屋大学のみとなり,主に東濃地震科学研究所との協力において行われている.(東京大学地震研究所[課題番号:0129];名古屋大学[課題番号:0905-2]) 3.4 アクロス 東京大学地震研究所と名古屋大学において研究開発が進められている(Higashihara et al., 2000).東京大学地震研究所では,コヒーレント弾性波を用いた地下構造解明のための理論的な波動発生効率の研究,また欠陥の少ない岩盤への震源装置の設置を行い理想的なフィールドでの実験を進めている(大竹・東原,2001; 佐伯・東原,2001; 東京大学地震研究所[課題番号0113b]).名古屋大学では,アクロスの実践での使用を想定して淡路島に設置した振動装置(Yamaoka et al., 2001;生田・他,2000)を15ヶ月間連続運転をし,P波とS波の速度変動をモニターした(図2).淡路島では15ヶ月の間,停電による停止を除いてトラブルなく運転をすることができた.アクロスの利用価値は,地下構造の連続モニターであり,この長期連続試験の成功は,アクロスの実用性を示している.1kmを越えた距離でこれだけの長期間連続でモニターできた装置は世界中他に例がない.15ヶ月間にわたるP波とS波変動の8割程度は震源装置周辺の岩盤特性の時間変動が原因であることが明らかになり,変動除去のためには周辺岩盤を含めた震源関数のモデル化が必要である.また鳥取県西部地震に伴うS波の遅れと異方性の変化が検出された.地下水位の変動と併せて考察すると,鳥取県西部地震の強震動により地下深部からの水の上昇などによる地下水圧の増加が岩盤の割れ目を押し開き,S波の遅れと異方性の変化をもたらしたと考えられる.(名古屋大学[課題番号:0905-1]) 3.5 高感度比抵抗変化計開発 京都大学防災研究所において行われた.送信に正弦波を用い,送受信ともにGPS時計に同期することによりSN比を飛躍的に高めることができた(山下・柳谷,2000;山下・他,2001).野島断層の注水実験の際の測定実験によると,注水によって作り出された広域の1%の比抵抗変化を見事にとらえた.またGPS同期を用いることにより,アクロスと同様,送信受信間の同期をワイヤーや無線によって直接とる必要がなくなり,観測のフレキシビリティーが格段に向上した.(京都大学防災研究所[課題番号:0216]) 4.実用への移行について 4.1 海底諸観測技術
ボアホールによる海底下での歪計の連続観測は開発のための試験観測から地球科学研究のための研究的要素を取り入れた試験観測の段階にすすんだ. 4.2 GPS音響結合式測地測量
現状で,測定精度を律速しているものは,船の位置と姿勢の計測精度である.この部分はすでに海外で実用化されているColombo(NASA)によるシステムを導入する.その結果,1~2年後には(3)研究要素を取り入れた試験観測の段階に至り,5年以内に実用化の段階に進む見込みである.今後5年以内に国内で複数のグループが競ってデータを生産することにより,データの信頼性などの客観的評価が可能になってくるであろう. 4.3 深部ボアホールによる歪み・応力測定
基本的には(1)機器開発段階から(2)開発のための試験観測段階と考えられる.現状においては,まだ精度を示すデータが得られておらず,実用化に至るかどうかは明らかではない.特に変動モニター技術として確立するためには,地下水位変動等の計測結果に及ぼす影響の評価が必要と考えられる.GPSにたいして,発表される論文が圧倒的に少ない理由は,ドリフトを含む長周期側のノイズレベルの問題,地震時のステップの信頼性の問題に起因しているものと見られ,これらの問題の解決も望まれる. 4.4 アクロス
地下構造モニターのための技術として,アクロスは(1)機器開発の段階から(2)開発のための試験観測の段階と考えられる.現状では,やっと淡路島における計測結果が出始め,客観的な評価が可能になってきた段階である.それでも現在論文として発表されているレベルの時間変動の検知(例えば,Nishimura et al., 2000)では,すでに現在のアクロスが精度的には上回っている.しかしながら,より精度を高めて(3)の段階に移行するためには震源関数のモデル化,送信および受信側のアレイの手法開発が必要である.エネルギー的にはアクロスと同等であるバイブロサイスによる地下深部探査が現実に行われている点を見ても,長期安定性が実現されれば,アクロスによる地下深部モニター実験が可能になると考えられる.これは(3)の段階である. 4.5 高感度比抵抗変化計開発 現在は(2)開発のための試験観測の段階であるが,解析手法としては既存のものを用いることができるため,すぐに(3)の段階に進むことができる. 5.まとめと地震予知研究における観測機器開発の役割 地震予知に限らず,自然科学の研究は観測・実験技術の進歩に伴って進歩する.革新的なGPSや広帯域地震計の導入は地震の研究に飛躍的な進歩をもたらしたことは周知の事実である.しかし残念なことに,これらは外国で開発されて実用化されたものを導入したにすぎない.また最近地盤構造でしばしば用いられる大型バイブレータも外国製である.これだけ大規模に地震研究が行われていながら,それを支える技術を外国に多く頼っているのは残念なことである.人材もさることながら,すぐには役立たないが将来は地震研究に役立つ可能性がある技術に対してのサポートが手薄いのも原因であろう. 観測技術開発計画推進部会では,最初に述べた(1)機器開発および(2)開発のための試験観測段階の研究を積極的にサポートしていきたい.現在研究が進められているものはいずれも実用化されれば新たな情報をもたらしてくれる重要な技術である.なかにはうまくいかないで途中で断念せざるを得ないものがあるかも知れないが,できるだけ多くの胞芽的な技術開発を進めておく方が成功する確率が高い.その意味では,現状では,まだまだ関心が一部であり,担当している大学も一部に偏っているのは問題である. 開発段階が(3)研究要素を取り入れた試験観測の段階に入る場合には,他の計画推進部会でのサポートが必要となる.通常の実験の中に,技術開発から生産された挑戦的な実験計画も含めて,より現実的な問題点を洗い出していくことがだいじであろう.また観測技術開発を担当する研究者側もユーザーとしての他の研究者が納得して評価できるデータを提出する必要がある.観測技術開発はしばしば自己目的化してしまい,本来の目的から見た性能評価がおろそかになる場合がある. このようにして,最終的に開発担当者の手がはなれれば,実用的な観測技術として歩き始めることができるのである. 文献 石井紘・山内常生・松本滋夫・池田隆司:インテリジェント回収型歪計を用いた超深度ボアホール孔における歪観測とオーバーコアによる初期応力測定.物理探査学会第102回学術講演論文集,109-113, 2000. Kanazawa, T., Shiobara, H., Mochizuki, M. and Shinohara, M.: Seismic observation system on the sea floor. OHP/ION 2001 symposium,2001. 藤本博巳・金澤敏彦・小泉金一郎・長田幸仁・三浦哲:海底地殻変動観測システムと音響測距,月刊地球,23,27-32,2001. Fujimoto, H. and Kanazawa, T.: Geodetic measurement system. OHP/ION 2001 symposium,2001. Higashihara,H., Yamaoka,K., Saeki, M.:Development of anew coherent seismic wave tomography method,Proceeding of the Fourtheenth Eng. Mech. Conference of ASCE, 2000. 生田領野・森口賢治・宮川幸治・國友孝洋,山岡耕春:野島断層注水実験におけるACROSSによる地震波速度変動の観測.地球惑星科学関連学会2000年合同大会,2000. 松本滋夫・石井紘・山内常生・窪田亮:超深度ボーリング孔における初期応力測定のためのオーバーコアリングシステムの開発.東京大学地震研究所技術報告,6,1-9, 2000. Nishimura, T., Uchida, N. Sato, H., Ohtake, M., Tanaka, S. and Hamaguchi, H.: Temporal changes of the crustal structure associated with the M6.1 earthquake on September 3, 1988, and the volcanic activity of Mount Iwate, Japan., Geophys. Res. Lett. , 27, 269-272, 2000. 大竹 雄次,東原 紘道:調和弾性波場を発生する人工震源装置アクロスの開発−東京大学地震研究所の弥生1号,2号について−,日本IFToMM会議 第7回シンポジウム前刷集,2001. Osada,Y., Fujimoto, H., Koizumi, K., Kanazawa, T. and Murakami, H.: Precise acoustic ranging and positioning. Proceedings of the 2000 International Symposium on Underwater Technology, IEEE Catalog No. 00EX418, 306-311, 2000. 佐伯 昌之,東原 紘道:精密制御人工震源の波動場励起力に関する理論的研究,応用力学論文集,Vol.3,pp.679-686, 2001. 田所敬一・安藤雅孝・佐藤一敏・山田卓司・奥田 隆・片尾 浩・岸本清行:音響測距−GPSリンクによる海底地殻変動観測システムの開発,地学雑誌,2001(印刷中). Yamaoka, K., Kunitomo, T., Miyakawa, K., Kobayashi, K., and Kumazawa, M.: A trial for monitoring temporal variation of seismic velocity using an ACROSS system. Island Arc, 2001(in press). 山下太・柳谷俊・大志万直人:GPS技術を利用したダイポール−ダイポール方による野島断層近傍での大地比抵抗モニタリング.月刊地球,23, 4,2001. 山下太・柳谷俊:応力検出をめざした活断層近傍での大地比抵抗モニタリング,地球惑星科学関連学会2000年合同大会,2000. 山内常生・石井紘・松本滋夫: 超深度ボアホールにおける初期応力測定のためのインテリジェント回収型歪計の開発.物理探査学会第102回学術講演論文集,104-108, 2000. <図の説明> 図1.音響結合GPSで達成された計測精度.ここでは相模湾での実験の結果を示す.左上の図で示された航跡にそって音響測距を行い,インバージョンによって海底局の位置を求めたのが右上の図である.得られた水平位置の95%信頼限界の範囲は5cm程度に収まる.左下は,それぞれの航跡におけるキネマティックGPSによる船の位置を示している.かなりばらつきが大きいので,信頼できる値のみを使用して海底局の位置の計算に用いた.右下は音波測距の往復走時である. 図2.淡路島野島断層近傍における,15ヶ月にわたるPおよびS波の地震波速度変動モニター結果.800mおよび1700mボアホールで共通に見られる走時変動は比較的浅い部分の変動によると考えられる.再下段に震源近傍で計測した振動の位相の時間変化を示してある.震源近傍の変動と地下深部での変動は非常に似ていることが判る.このことから,深部でとらえられた変動のかなりの部分は震源周辺の地盤の特性変動によることが判る.鳥取県西部地震に伴いS波の変動が見られているが,これは震源周りではなく,それよりも深い場所での変動を示している. |
{kind=link}