
|
抧恔尋媶強択榖夛丂戞838夞丂乮2006擭 4寧乯
俧俹俽亅壒嬁寢崌曽幃偵傛傞奀掙抧妅曄摦寁應庤朄偺奐敪
惗揷椞栰丄埨摗夒岶丒揷強宧堦丒墱揷棽丒悪杮怲屷乮柤屆壆戝乯
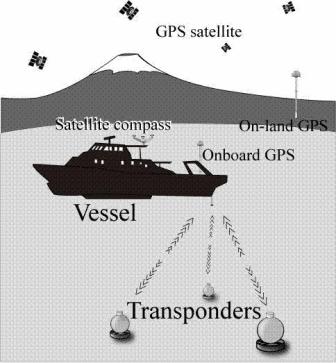
柤屆壆戝妛偺僌儖乕僾偱偼娤應慏偺埵抲傪僉僱儅僥傿僢僋GPS應埵偱寛掕偟丆慏乮慏忋嬊乯亅奀掙嬊娫偺嫍棧傪挻壒攇應嫍偱應掕偟偰奀掙嬊埵抲傪寛掕偡傞奀掙抧妅曄摦娤應僔僗僥儉傪奐敪偟偰偄傞乮恾侾乯丏俀侽侽俀擭屻敿偐傜弜壨榩偲孎栰撳偵暋悢揰偺奀掙嬊傪揥奐偟丆杮奿揑側嬊埵抲偺孞傝曉偟應埵傪奐巒偟偨丏
弜壨榩偱偼俀侽侽俀擭侾侽寧偵弜壨榩杒晹(悈怺栺俉侽侽m)偺僒僀僩偵栺俆擭娫宲懕娤應偑壜擻側奀掙嬊傪捈宎栺俆侽侽m偺斖埻偵俁戜愝抲偟偰偄傞丏尰帪揰偱偼偙偺僒僀僩偱俆夞偺孞傝曉偟應埵傪峴側偭偰偄傞乮恾俀亅倎乯丏僉僱儅僥傿僢僋GPS應埵偺偨傔偺婎弨嬊偼丆弜壨榩偱偼婎慄挿栺俁侽倠倣偺棨忋偵愝抲偟偨丏夝愅偵偼僉僱儅僥傿僢僋愱梡偺僜僼僩僂僄傾偱偁傞GrafNav傪巊梡偟偨丏峏偵慏忋偺GPS傾儞僥僫偲奀拞偵弌偟偨挻壒攇憲庴怣憰抲乮僩儔儞僗僨儏乕僒乯偺憡懳埵抲傪抦傞偨傔偵僒僥儔僀僩僐儞僷僗乮僼儖僲乯傪巊梡偟偨丏
挻壒攇應嫍偼挭棳偲晽岦偒傪尒偰忋曽偵娤應慏傪堏摦偟丆僄儞僕儞傪巭傔偰奀掙嬊忋傪棳偟側偑傜偺憲庴怣傪偔傝曉偟偨丏堦夞偺娤應偵偮偒愮悢昐屄偺應嫍僨乕僞偺庢摼傪峴側偭偨丏俁戜偺奀掙嬊偲慏偺堏摦偵傛傝攇慄偺婔壗妛攝抲傪壱偖偙偲偱丆壒懍峔憿偺帪嬻娫曄壔偲奀掙嬊埵抲偺悇掕傪摨帪偵峴側偆偙偲偑偱偒傞丏俠俿俢偵傛偭偰寁應偟偨壒懍峔憿偐傜悈暯惉憌峔憿傪壖掕偟丆偙偺奺憌偺懍搙傪兛攞偡傞宍偱壒懍峔憿偑帪娫嬻娫曄壔偟偰偄傞偲偟偨丏曗惓抣兛偺帪嬻娫曄壔偺儌僨儖偲偟偰丆杮夝愅偱偼娚傗偐偵曄壔偡傞偲偄偆壖掕偺壓偱悇掕傪峴側偭偰偄傞丏娚傗偐偝偼壒懍峔憿偺帪嬻娫曄壔偺寖偟偝偵傛偭偰娤應偺搙偛偲偵曄傢傞傋偒偱偁傞丏奺娤應婜娫偵偍偄偰娚傗偐偝傪寛傔傞僴僀僷乕僷儔儊僞乕偼丆娤應枅偵僨乕僞傪慜敿偲屻敿偵暘偗偰暿乆偵夝愅偟丆奀掙嬊埵抲偑嵟傕嬤偔寛傑傞傕偺傪嵟揔偲偟偨丏
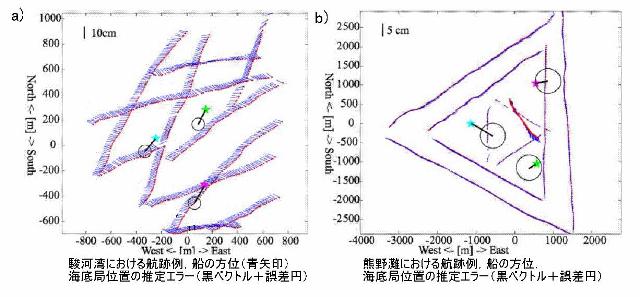
偙偺傛偆側庤朄傪梡偄偰奀掙嬊埵抲悇掕傪峴偄丆偦偺嵞尰惈傪尒偨丏寢壥丆奀掙嬊埵抲偼悈暯柺偱敿宎俀侽cm偺墌撪偵偽傜偮偄偰寛傑偭偰偄偨丏弜壨榩偵偍偗傞俀擭娫偱偺僾儗乕僩娫曄埵検偼戝偒偔偰傕俆cm掱搙偲尒愊傕傜傟傞偺偱丆俀侽cm偺曄摦偼柧傜偐偵悇掕偺岆嵎偱偁傞丏
孎栰撳偱偼俀侽侽係擭俈寧偵婭埳敿搰撿搶晹乮悈怺栺俀侽侽侽m乯偺捈宎栺俀侽侽侽m偺斖埻偵俁偮偺奀掙嬊傪愝抲偟偨乮恾俀亅倐乯丏尰帪揰偱偼偙偺僒僀僩偱俋夞偺孞傝曉偟應埵傪峴偄丆奀嫷偺偨傔偵偦偺偆偪俇夞偱廫暘側應掕偑偱偒偰偄傞丏僉僱儅僥傿僢僋GPS應埵偺偨傔偺婎弨嬊偺婎慄挿偼孎栰撳偱偼栺俇侽倠倣偱偁偭偨丏孎栰撳偺娤應偑弜壨榩偲嵟傕堎側傞揰偼丆弜壨榩偱偼娤應慏偺僗僋儕儏乕傪巭傔偰僪儕僼僩偝偣側偑傜寁應偟偨偺偵懳偟丆孎栰撳偱偼娤應慏傪擟堄偵堏摦偝偣側偑傜挻壒攇偺憲庴怣傪孞傝曉偟偨揰偱偁傞丏孎栰撳偵偮偄偰傕奀掙嬊埵抲悇掕傪孞傝曉偟峴偭偰偦偺嵞尰惈傪尒傞偲丆奀掙嬊埵抲偼暯忢帪丆悈暯柺撪偱敿宎俆cm偺墌撪偵偽傜偮偄偰寛傑偭偰偍傝丆峏偵偼俀侽侽係擭俋寧偺婭埳敿搰撿搶壂抧恔偵敽偆撿岦偒偺俀侽cm偺曄埵偑専弌偝傟偨丏
娤應僨僓僀儞偲壒懍峔憿曄壔偺應埵岆嵎傊偺塭嬁傪摿掕偡傞偨傔偵丆幚嵺偺娤應慏偺峲愓偵條乆側壒懍峔憿偺帪娫嬻娫曄壔傪梌偊偰媅帡憱帪僨乕僞傪嶌惉偟丆嬊埵抲悇掕傪峴偭偨丏偦偺寢壥丆20cm偲偄偆弜壨榩偱偺嵞尰惈偺埆偝偺尨場偼娤應慏婳愓偺婔壗妛揑攝抲偲憲庴怣夞悢偺晄廫暘偝偵媮傔傜傟傞偙偲偑敾柧偟偨丏峏偵弜壨榩偵偍偗傞僄儞僕儞傪巭傔偰慏傪棳偡娤應僨僓僀儞乮恾俁亅倎乯偑丆慏忋應婍攝抲偺應検岆嵎傗愝抲偺嵞尰惈偺埆偝偵旕忢偵晀姶偱偁傝丆偙傟傜傕戝偒側岆嵎梫場偲側傝偆傞偙偲偑帵偝傟偨丏
應慄偺婔壗妛揑攝抲傪岺晇偡傞偙偲偱慏忋應婍偺應検岆嵎偵懳偟偰傕婃嫮側僨乕僞庢摼偑偱偒丆應嫍僨乕僞悢傪尰忬偺攞偵偡傞偙偲偱悢僙儞僠偺惛搙偑婜懸偝傟傞丏孎栰撳偵偍偗傞娤應偱偼偙傟偑嵞尰偝傟偰偍傝乮恾俁亅倐乯丆尰帪揰偱亇栺5cm偺惛搙偱夝偑摼傜傟傞偙偲偑帵偝傟丆幚嵺偺寢壥偲惍崌偟偰偄傞丏
 丂丂丂
丂丂丂
恾侾丂奀掙抧妅曄摦娤應僔僗僥儉
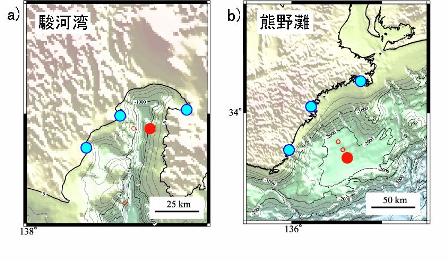
恾俀丂娤應揰
 丂
丂
恾3丂寁應丆嬊埵抲悇掕庤朄偺岆嵎昡壙