課題番号:1706
平成21年度年次報告
(1)実施機関名
名古屋大学
(2)研究課題(または観測項目)名
GPS/音響方式海底地殻変動観測システムの高度化
(3)最も関連の深い建議の項目
- 3.新たな観測技術の開発
- (1)海底における観測技術の開発と高度化
- ア.海底地殻変動観測技術
(4)その他関連する建議の項目
- 1.地震・火山現象予測のための観測研究の推進
- (1)地震・火山現象のモニタリングシステムの高度化
- ウ.東海・東南海・南海地域
(5)本課題の5か年の到達目標
GPS/音響方式の海底地殻変動観測システムをモニタリングに資する実用的なものにポリッシュアップするにあたり,現状では1) 高精度化,2) 観測・解析の効率化,3) 広域・多点観測の実施,4) 連続的観測および機動観測,5) システムの標準化および普及型システムの開発が課題となっている.これらのうち,本課題では1)および2)を実施する.3)については名古屋大学で実施する他の計画「駿河-南海トラフ周辺における多項目統合モニタリング」で実施する.
1) 高精度化
これまでの研究開発の結果,海中音速構造の時空間変化が海底局位置決定の精度に大きく影響していることが分かった.この問題を解決しなければ,海底地殻変動観測システムの高精度化は実現しない.そのため,水温水圧計による水温(音速構造)を連続的に測定し,その測定結果を取り入れた解析方法を開発する.また,複数の船上局を用いた音響トモグラフィ的手法を用いたシステムの開発に取りかかり,駿河湾や熊野灘等の実海域でデータ取得を行い,精度向上への有効性を評価する.
2) 観測・解析の効率化
これまでは,GPS解析に使用する暦として最終精密暦を用いていた.そのため,解析結果が出るまでに1ヵ月程度の時間を要していた.GPS解析をより早く行うためには,約3時間後に出される超速報暦を用いるのが効果的であると考えられる.そこで,衛星数や時期によらずに超速報暦が常に有効であるかを評価し,解析に導入する.また,多点観測が推進された際の膨大なデータ量に対応した新たな解析アルゴリズムの開発・検討も実施する.
(6)本課題の5か年計画の概要
平成21年度においては,実海域で水温水圧計による水温(音速構造)を連続的に測定し,海中音速構造の時空間変化に対する基礎データを取得する.また,GPSの超速報暦を試験的に導入し,有効性を評価する.また,膨大なデータ量に対応した新たな解析アルゴリズムの開発を開始し,その有効性を評価する.
平成22年度においては,実海域で水温水圧計による水温(音速構造)の連続的測定を継続するとともに,複数の船上局を用いた音響測距システムの設計を行う.また,膨大なデータ量に対応した新たな解析アルゴリズムを開発し,過去のデータに適用する.
平成23年度においては,実海域で水温水圧計による水温(音速構造)の連続的測定を継続するとともに,その測定結果を取り入れた解析方法を開発し,実海域で取得した水温水圧計のデータに適用して,その有効性を評価する.また,複数の船上局を用いた音響測距システムの試験を開始する.さらに,膨大なデータ量に対応した新たな解析アルゴリズムを過去のデータに適用して再解析を実施する.
平成24年度においては,複数の船上局を用いた音響測距システムの試験を継続し,高精度化への有効性を評価する.
平成25年度においては,水温水圧計による水温の連続的測定,複数の船上局を用いた音響測距システム,GPSの超速報暦,新たな解析アルゴリズムを組み合わせ,高精度な測定を効率よく行うシステムの構築を目指す.
(7)平成21年度成果の概要
海底地殻変動観測システムの高精度化へ向けた試みとして,海中音速構造の空間変化と海底ベンチマーク位置決定精度の関係を評価した.評価に使用したのは,熊野灘に設置した海底ベンチマークKMEで取得した音響測距データである.KMEベンチマークでは,これまでに5回の繰り返し観測を実施している.そのうち2回(2008年10月と2009年8月)の座標値は時系列のトレンドから北方向へ大きく乖離していた.この原因を究明するために,座標値がトレンドに乗っているとした場合の走時残差を計算した.その結果,南の方の走時残差は正,北の方の走時残差は負になっていた(図1).この原因は,解析アルゴリズムでは海中音速構造を水平成層であると仮定して海底ベンチマーク座標を決定していることにある.走時残差の分布から,実際の音速は南の方が遅く,北の方が速いことが分かる.このような音速構造をしているにも関わらず水平成層構造を仮定して海底ベンチマーク座標を決定した場合,北方向へバイアスが乗ることになり,海底ベンチマーク座標の決定結果に見られたバイアスの方向と一致する.したがって,海中音速構造の空間変化(傾斜構造)が海底ベンチマーク座標のバイアスに影響を与えることが確認された.
駿河湾において音響トモグラフィ的手法を用いたシステムの開発のため,小型の係留ブイ1台と船舶の両方に搭載した海上局から交互に音響測距を行ってデータを取得した.各海底局との音響信号の走時残差を見てみると,3つの海底局のうち1つの海底局に対しての走時残差が,他の2つの海底局に対しての走時残差よりも大きいという結果になった.この結果は,観測海域において海中音速構造に傾斜があることを意味しており,海上局を複数にすることによって海中音速構造の傾斜を推定できる目処が立った.
膨大な量の全ての観測データを一度に利用する新たな解析アルゴリズムを試作し,実データに適用した.これまでのアルゴリズムでは,毎回の観測毎に,3つの海底局の座標値を別々に求めて3つの海底局からなる三角形の重心位置として海底ベンチマーク座標を求めていた.これに対し,新しいアルゴリズムでは,全観測データからあらかじめ3つの海底局からなる三角形の形状を決定しておき,この三角形の形状は変化しないとした.このような制約を与えて,毎回の観測によって得られたデータから各回の海底ベンチマーク座標を求めることにした.この新しいアルゴリズムを熊野灘の2箇所(KMNおよびKMSベンチマーク)で取得した実データに適用した結果,アムール準拠の変位速度ベクトルは,KMNでは(NS, EW)=(0.0±1.3 cm/yr,-4.0±1.0 cm/yr),KMSでは(NS, EW)=(1.6±0.5 cm/yr,-3.7±0.9 cm/yr)となり,変位速度ベクトルの推定誤差も低減した(図2).
(8)平成21年度の成果に関連の深いもので、平成21年度に公表された主な成果物(論文・報告書等)
- Ikuta, R., K. Tadokoro, S. Sugimoto, T. Watanabe, T. Okuda, K. Sayanagi, and M. Ando, 2009, Toward better accuracy for measurement of ocean bottom crustal deformation, Eos Trans. AGU, 90(52), Fall Meet. Suppl., Abstract S51D-08.
- Watanabe, T., K. Tadokoro, S. Sugimoto, T. Okuda, K. Miyata, and M. Kuno, 2009, Consideration of optimum site distribution for detecting seafloor crustal deformation at the Nankai subduction zone, Eos Trans. AGU, 90(52), Fall Meet. Suppl., Abstract G33B-0646.
- Sugimoto, S, K. Tadokoro, R. Ikuta, T. Watanabe, T. Okuda, K. Sayanagi, K. Miyata, and T. Nagao, 2009, Estimation of spatiotemporal variation of acoustic velocity in ocean and its modeling for GPS/Acoustic seafloor positioning, Eos Trans. AGU, 90(52), Fall Meet. Suppl., Abstract S53A-1456.
- 田所敬一・杉本慎吾・渡部 豪・宮田皓司・武藤大介・奥田 隆・佐柳敬造・久野正博,2009,駿河−南海トラフにおける海底地殻変動観測:水平変動の測定結果と今後の課題,地球惑星科学連合大会.
- 生田領野・田所敬一・奥田 隆・杉本慎吾・渡部 豪・佐柳敬造・安藤雅孝,2009,海底地殻変動計測精度向上のための解析システムOCDASANの改訂,地球惑星科学連合大会.
- 杉本慎吾・田所敬一・生田領野・奥田 隆・渡部 豪・武藤大介・木元章典・宮田皓司・島村航也・佐柳敬造,2009,海中の温度・圧力連続計測から推定する海洋内部波スペクトル,地球惑星科学連合大会.
- 渡部 豪・田所敬一・杉本慎吾・奥田 隆・武藤大介・木元章典・宮田皓司・久野正博,2009,南海トラフにおける海底地殻変動観測のすべり欠損速度検知能力,地球惑星科学連合大会.
- 宮田皓司・田所敬一・杉本慎吾・渡部 豪・中村 衛・安藤雅孝・奥田 隆・武藤大介・木元章典,2009,ジャイロとサテライトコンパスによる海底地殻変動解析結果の違い,地球惑星科学連合大会.
- 田所敬一・杉本慎吾・渡部 豪・奥田 隆・生田領野・佐柳敬造,2009,2009年8月11日駿河湾の地震震央近傍における海底地殻変動観測,日本地震学会秋季大会.
- 渡部 豪・田所敬一・杉本慎吾・奥田隆・宮田皓司・久野正博,2009,南海トラフにおける海底地殻変動観測と最適な観測点配置の検討,日本地震学会秋季大会.
- 杉本慎吾・田所敬一・生田領野・渡部 豪・奥田 隆・宮田皓司・佐柳敬造・長尾年恭,2009,海中音速の時空間変化を同時推定する海底測位手法の開発,日本地震学会秋季大会.
- 宮田皓司・田所敬一・渡部 豪・中村 衛・安藤雅孝・杉本慎吾・奥田 隆・武藤大介,2009,熊野灘と琉球海溝における海底地殻変動観測,日本地震学会秋季大会.
- 杉本慎吾・田所敬一・渡部 豪・奥田 隆・宮田皓司・生田領野・佐柳敬造・長尾年恭,2009,海底地殻変動観測における海中音速傾斜推定,日本測地学会第 112回講演会.
(9)平成22年度実施計画の概要
音響トモグラフィ的手法の開発として,観測船と小型係留ブイとを用いた船上2点方式では,海中音速構造の傾斜はある程度推定できることが平成21年度の研究で明らかになったものの,海底ベンチマーク位置決定の高度化につなげるのは困難である.その理由は,観測船は時間をかけて海底ベンチマークの周辺を周回するため,海中音速構造の時間変化と空間変化との分離が困難だからである.そこで,海上局を5台程度の複数にする必要があり,その音響測距システムの設計を行う.また,平成21年度に試作した新たな解析アルゴリズムを完成させ,過去に取得した全データに適用し,その有効性と問題点を検討する.この開発研究は,名古屋大学の別課題「駿河-南海トラフ周辺における多項目統合モニタリング」(課題番号1701)と連携して行う.
解析時間の短縮のためには,現状ではGPS測位に利用する衛星軌道暦の問題がある.現在は精密暦を使用しているが,その場合,解析には1ヵ月程度以上を要する.そこで,より早期に提供される超速報暦を利用する方法が考えられるが,その場合,海域における50kmを越える長基線での測位にも精度の上で有効かを検討する.
(10)実施機関の参加者氏名または部署等名
名古屋大学環境学研究科 田所敬一,渡部 豪,杉本慎吾
他機関との共同研究の有無
有
静岡大学理学部 生田領野東海大学海洋研究所 佐柳敬造,長尾年恭
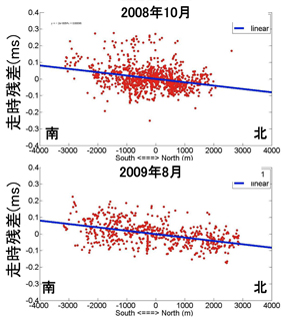
図1:座標値がトレンドに乗っているとした場合の南北方向の走時残差
傾きがあることから,海中音速構造に南北方向の傾斜があることが分かる.

図2:新たなアルゴリズムで解析した局地直交座標系でのKMN(上)およびKMS(下)ベンチマーク座標の時系列
白丸はデータ数が著しく少ないため,トレンド推定には用いていない.